Primeira Fase: Pré análise
Grupo:
Mauro C. Pichiliani
Juliano Augusto Pereira
Contextualização
O
veículo anfíbio-voador Triphibius possui vários subsistemas
cruciais para sua operação. Um destes subsistemas é o de sensoriamento e
navegação, que através da captação das características externas do ambiente e
dos comandos internos do veículo enviará as informações necessárias para o
computador principal. Os sensores conectados ao veículo geram uma série de
informações que devem ser tratadas e analisadas pelo navegador, e enviadas para
uma central que faz o controle de posicionamento e rota de todos os Triphibius
dentro de um ambiente conhecido pela central.
Para
ajudar no treinamento de pilotos e para testar o veículo contra diversas
condições ambientais, um subsistema de simulação remota irá permitir que se
emule a utilização do veículo em diversos ambientes, antes de existir a
navegação efetiva. Esse simulador tem o mesmo poder de controle do Triphibius
real e também pode se comunicar com uma central, de forma que a central
possa interagir veículos reais com veículos simulados dentro de um mesmo
ambiente conhecido ou virtual.
Objetivação
Definição
do Problema: Agregar ao veículo
anfíbio-voador Triphibius um subsistema que permita o correto
controle dos sensores navegacionais, e um subsistema para simulação remota do
veículo com o objetivo de auxiliar o treinamento de pilotos. Possibilitar que
um ou mais servidores sejam capazes de receber as informações de localização e
navegação de cada um dos veículos que estejam em operação dentro do ambiente
conhecido ou virtual.
Definição
da Solução Escolhida: A solução
encontrada foi modelar e desenvolver um subsistema que receberá as diversas
informações dos sensores do sistema e transmitirá até o computador de navegação
do veículo e ao servidor central. As informações que o sensor captar devem ser
reproduzidas no ambiente de simulação remoto, que reproduzirá um ambiente
virtual para a navegação do veículo.
Titulação
Subsistema
de Sensoriamento e Simulação Remota - SUBSSIR
Especificação de requisitos
O
Subsistema computadorizado para Sensoriamento e Simulação Remota – SUBSSIR é
composto por vários módulos independentes que executam funções distintas e
devem atender aos seguintes requisitos:
1)
Descrição das interfaces
de edição e construção de ambientes simulados pelo sistema de sensoriamento;
2)
Especificação das
informações que serão captadas pelo veículo ou simulador de veículo e enviadas
à central;
3)
Definição de um
método de comunicação de todas as informações de localização e navegação dos
veículos a um servidor.
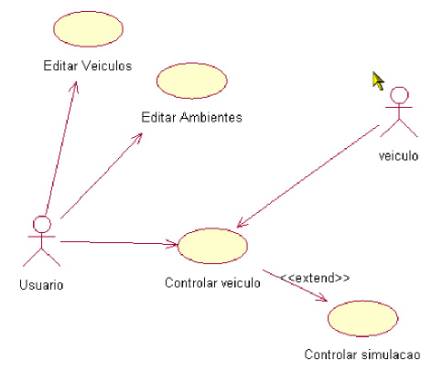
Diagrama de Casos de Uso